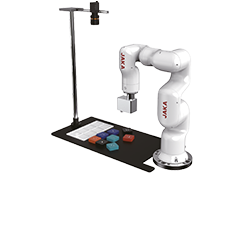





Kit Robot collaboratif JAKA MiniCobot
Ce kit de programmation se compose d'un robot collaboratif, d'un contrôleur, d'un pupitre de mise en service d'un module de vision et d'une pince à vide, un plateau équipé d'une perche et d'accessoires pour réaliser des activités pédagogiques.
Robot collaboratif :
Le MiniCobot Jaka dispose de 6 axes, son amplitude de 580 mm et sa capacité de 1kg lui permettent un champ d'application varié.
Le poignet dispose d'un connecteur M8 recevant 2 entrées TOR, 2 sorties TOR et 1 entrée ANA.
Contrôleur :
Le contrôleur MiniCab est très compact, il dispose de 7 Entrées/sorties configurable et d'une entrée Safety 2 voix. Il est communicant en TCP/IP, Modbus TCP, Modbus RTU, Profinet, Ethernet/IP. Il dispose de son propre réseau Wi-Fi réactif pour la programmation.
La programmation se fait de manière graphique et intuitive pour la rendre accessible à tous.
La programmation se fait par une application embarquée utilisable sur PC ou Tablette Android.
Pince à vide :
Contrairement à de nombreux préhenseurs à vide, le JAKA VAC n'a pas besoin d'une source d'air dédiée pour le faire fonctionner.
Il s'agit d'une unité autonome qui ne nécessite qu'une alimentation électrique et qui est installée à l'extrémité du bras du cobot, se connectant via un port IO.
Avec une programmation simple, il peut ramasser une variété d'objets différents.
Module de vision :
Le module de vision se compose de la caméra JAKA Lens 2D, d'objectifs et d'une source lumineuse.
Il peut être fixé à l'extérieur ou monté à l'extrémité du bras du cobot.